
Обертальний рух та вектори (правило правої руки)
До цього такі параметри обертального руху, як кутова швидкість та кутове прискорення розглядалися як скалярні величини. Але, фактично, дані параметри є векторами, тому що мають не тільки величину, а й напрямок.
Наприклад, колесо автомобіля має не тільки кутову швидкість, але й кутове прискорення, при цьому, напрям кутової швидкості колеса не збігається з напрямком лінійної тангенціальної швидкості, а перпендикулярно площині колеса (кутова швидкість спрямована вздовж осі колеса, що обертається).
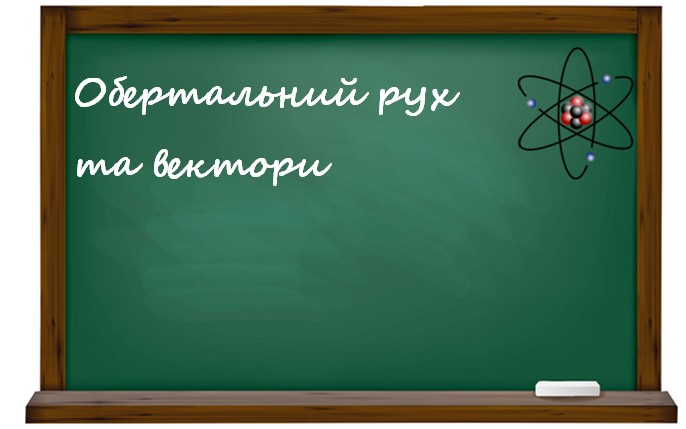
У колесі, що обертається, єдиною нерухомою точкою є його центр, тому початок вектора кутової швидкості розташовують в центрі кола обертання.
Правило правої руки (визначення напрямку вектора кутової швидкості): якщо долонею правої руки охопити вісь обертання, таким чином, щоб пальці руки збігалися з напрямком тангенціальної швидкості, то витягнутий великий палець буде вказувати напрям вектора кутової швидкості ω.
Як визначити напрям кутового прискорення
Кутове прискорення визначається формулою:
![]()
- α – кутове прискорення;
- Δω – зміна кутової швидкості;
- Δt – час зміни кутової швидкості.
У векторній формі рівняння записується так:
![]()
- α – вектор кутового прискорення;
- Δω – зміна вектора кутової швидкості;
- Δt – час зміни кутової швидкості.
Таким чином, напрям вектора кутового прискорення збігається із напрямом зміни вектора кутової швидкості.
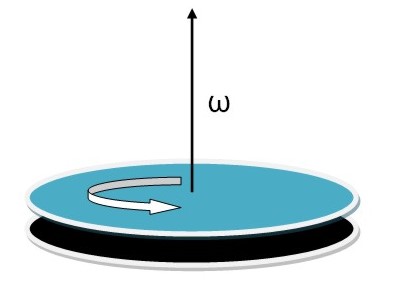
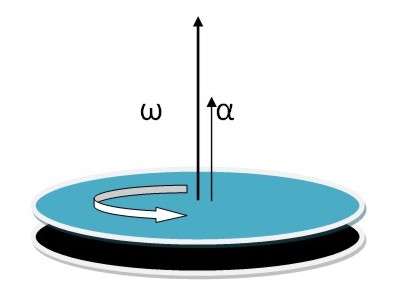
Вектор кутової швидкості може змінюватись лише за величиною. А ось вектор кутового прискорення може змінюватися не тільки за величиною, а й у напрямку – при прискоренні напрямок векторів кутової швидкості та прискорення збігаються, а при уповільненні вони спрямовані у протилежні сторони.
Напрямок векторів кутової швидкості та кутового прискорення збігаються (кутова швидкість збільшується).
Вектор кутового прискорення спрямований у протилежний бік від вектора кутової швидкості (кутова швидкість зменшується).